Noushad SojibI am a Ph.D. candidate in Computer Science at the Cognitive Assistive Robotics Lab, University of New Hampshire, advised by Professor Momotaz Begum.
I completed my B.Sc. in Computer Science and Engineering from
Shahjalal University of Science and Technology,
where I was fortunate to work with my childhood idol,
Professor M. Zafar Iqbal—a renowned scientist and science-fiction writer..
Email / GitHub / Google Scholar / LinkedIn |

|
ResearchI am interested in making robot learn from lay users demonstrations. Since this data might be imperfect or contain errors, my focus is on developing methods for robots to learn safe and reliable behaviors from it. |

|
Self Supervised Detection of Incorrect Human Demonstrations: A Path Toward Safe Imitation Learning by Robots in the WildNoushad Sojib, Momotaz Begum IROS 2024, 2024 We propose a Behavior Cloning for Error Detection (BED) framework that can detect incorrect human demonstrations in a self-supervised manner. With lay users demonstration we show that using our method robots can learn to avoid unsafe behaviors. We demonstrate the effectiveness of our method in RoboSuite simulation and with a Sawyer robot. |
|
Self-Supervised Visual Motor Skills via Neural Radiance FieldsPaul Gesel, Noushad Sojib, Momotaz Begum IROS 2023, 2023 We propose a novel network architecture for visual imitation learning that exploits neural radiance fields (NeRFs) and key-point correspondence for self-supervised visual motor policy learning. |
Robot From ScratchI was inspired by the ASIMO robot, but there were no such robots in my country back then. Out of curiosity, I started learning how to build humanoid robots myself. During my undergraduate years, I founded RoboSUST, a robotics club where I worked with other passionate students to build several robots from scratch, including a biped walking humanoid. |

|
Ribo RobotFeatures: A 24 DOF humanoid robot with a friendly interface capable of hand and arm manipulation. My Role: Team Leader and Programmer. Outcome: Ribo became one of the first humanoid robots publicly demonstrated in my country. It was showcased at multiple national events, drew strong interest from students and young people, and received wide coverage in newspapers and on television. |
|
Lee: A biped walking robotFeatures: Biped walking humanoid robot developed with low costly hardware. My Role: Team Leader and Programmer. |

|
KiddoFeatures: An educational robot for children. My Role: solo project Simulation and hardware. |
Hardware DesignAs I pursued my goal of building robots from scratch, I discovered a passion for designing smart devices—some of which are shown below. |
|
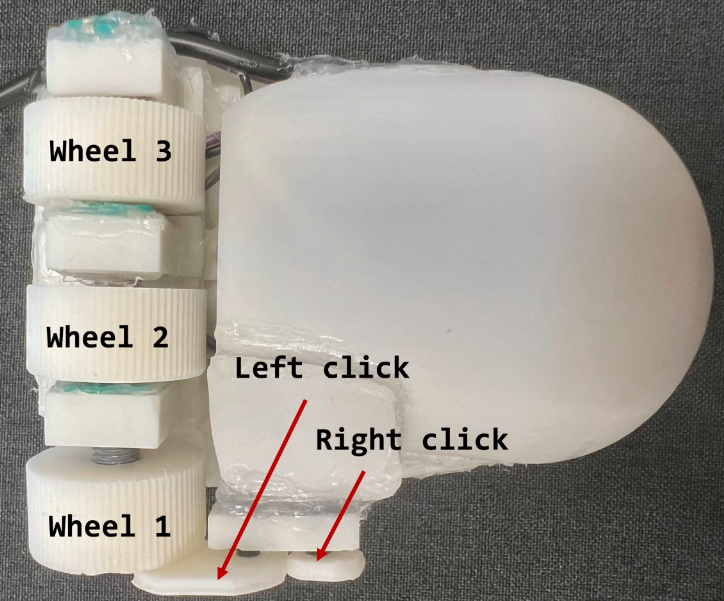
3Wheel MouseFeatures: Mouse for visually impaired people. My Role: Design and Prototype Outcome: Islam, Md Touhidul, et al. “Wheeler: A three-wheeled input device for usable, efficient, and versatile non-visual interaction.” Proceedings of the 37th Annual ACM Symposium on User Interface Software and Technology. 2024. Paper and Video: |
|
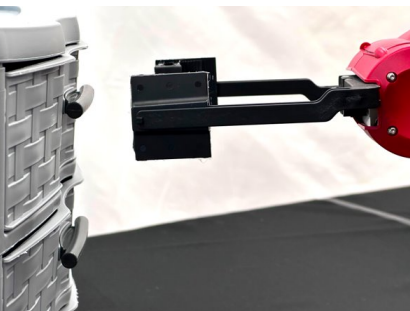
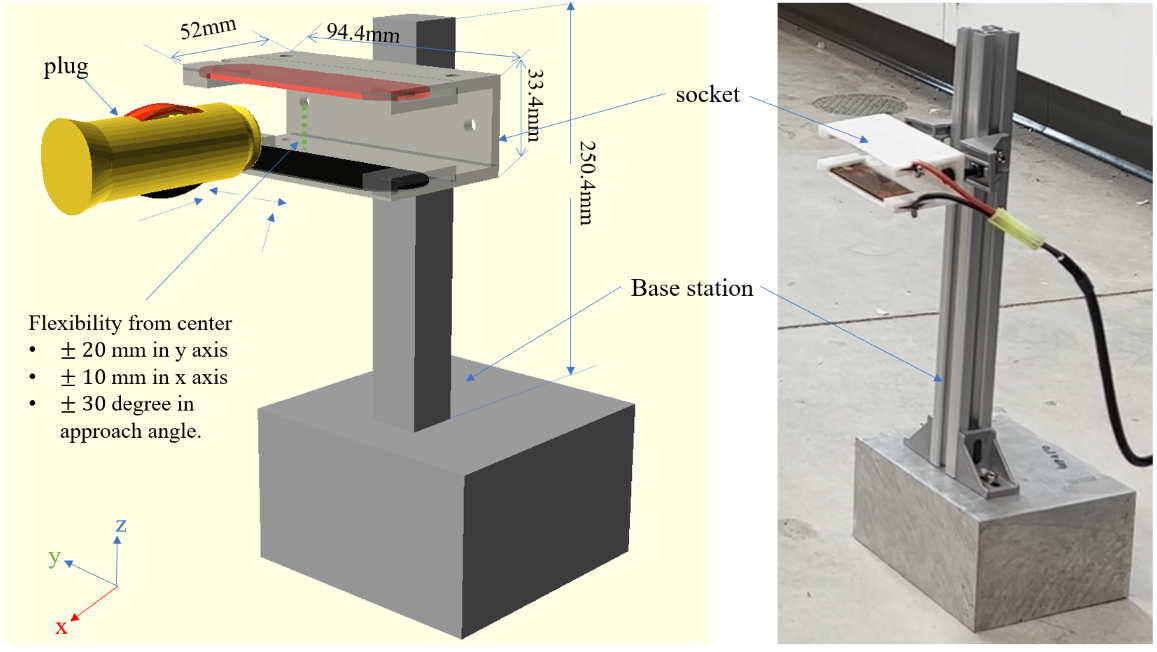
Charging DockFeatures: Robust low cost charging dock for mobile robot. My Role: Design and Prototype Outcome:
|
|
Lowcost Braille DisplayFeatures: Braille for visually impaired people. My Role: Design and Prototype Outcome: Sojib, Noushad, and M. Zafar Iqbal. “Single cell bangla braille book reader for visually impaired people.” 2018 International Conference on Bangla Speech and Language Processing (ICBSLP). IEEE, 2018. Paper |
|
Design and source code from Jon Barron's website |