Noushad SojibRobot Learning Engineer building robust policies from imperfect human demonstrations. Focused on imitation learning, VLA models, and diffusion policies for real-world robotic systems. M.Sc. in Computer Science from the University of New Hampshire (Cognitive Assistive Robotics Lab). B.Sc. from SUST, where I founded a robotics club and built humanoid robots from scratch. Currently seeking roles in robot learning and real-world robotic systems. Resume / Email / GitHub / Google Scholar / LinkedIn |

|
Robot Learning |
|
Robot From ScratchLimited access to robotic platforms led me to build robots from scratch and found RoboSUST, where I led the design and deployment of low-cost robotic systems. |

|
Ribo — 24 DOF Humanoid RobotDesigned and built a full humanoid robot capable of upper-body manipulation and human-interactive behaviors. Role: Team Lead — hardware, software, and interaction interface Publication at IEEE R10-HTC 2017 / Key Contributions: Led hardware and software development of a 24 DOF humanoid platform. Implemented control for coordinated arm and hand motion. Designed user-facing interaction interface. |
|
Lee: A biped walking robotBuilt a biped robot focused on achieving stable walking with minimal hardware cost. Role: Team Lead — mechanical design, gait control, and software Key Contributions: Designed mechanical structure for balance and locomotion. Implemented basic gait generation and control. Optimized for low-cost components. |

|
KiddoInteractive educational robot designed to engage children through programmable behaviors—built and validated in both simulation and physical hardware. Role: Solo Designer & Developer Publication at IEEE IRCE 2020 / |
Hardware DesignExperience building robots from scratch led me to design embedded systems that support reliable deployment, with multiple systems published and used on research platforms. |
|
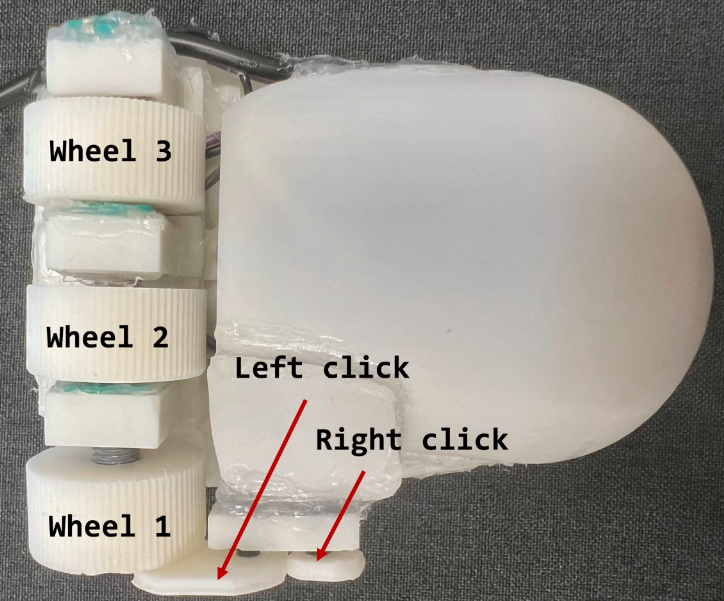
3Wheel MouseThree-wheeled input device that enables efficient, versatile non-visual computer interaction for blind users. Role: Designer & Prototype Builder — published at ACM UIST 2024 Islam, Md Touhidul, et al. “Wheeler: A three-wheeled input device for usable, efficient, and versatile non-visual interaction.” ACM UIST 2024. Paper & Video |
|
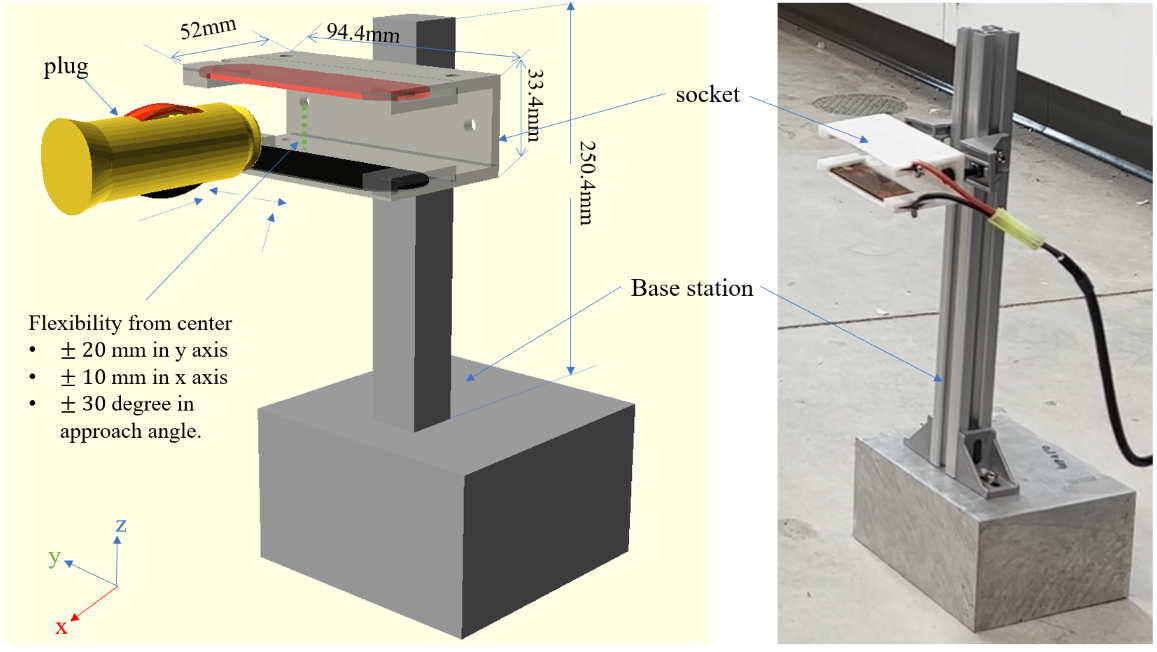
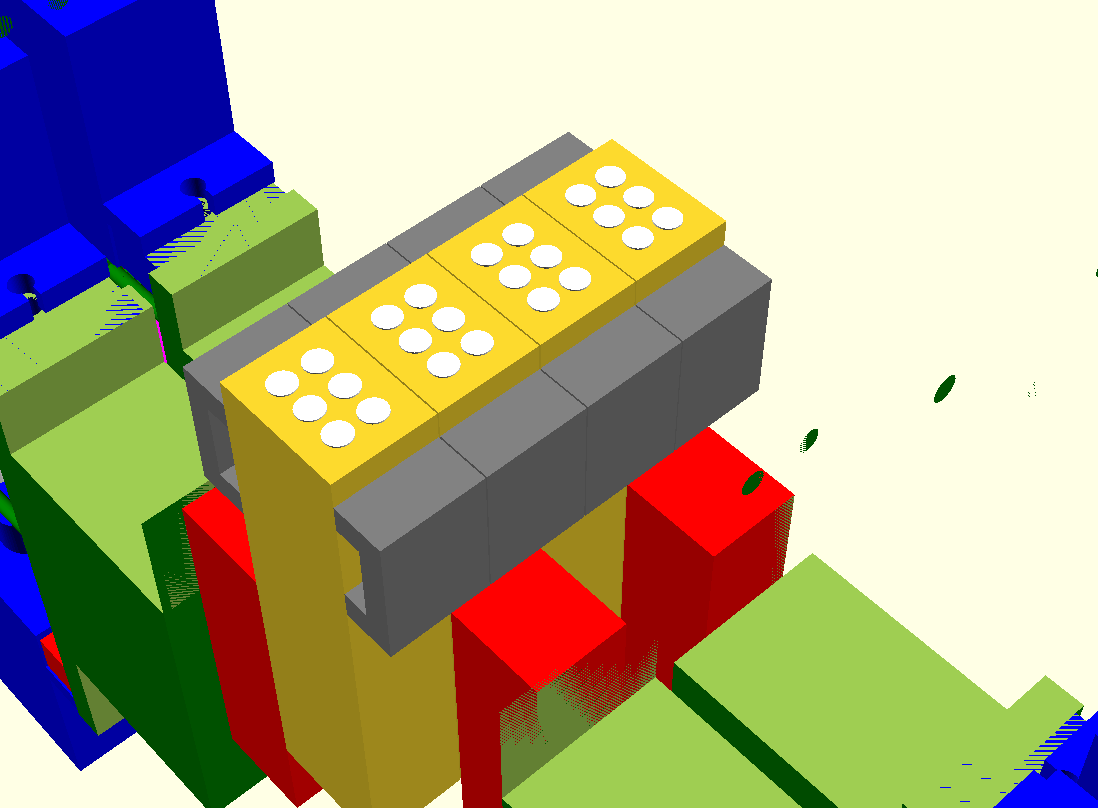
Charging DockRobust, low-cost autonomous charging dock for mobile robots—enabling continuous operation without human intervention. Role: Designer & Prototype Builder — deployed on Hello Stretch and Jackal robot code / website / |
|
Lowcost Braille DisplayLow-cost single-cell Braille display that makes digital Bangla text accessible to visually impaired readers. Role: Designer & Prototype Builder — published at IEEE ICBSLP 2018 Sojib, Noushad, and M. Zafar Iqbal. “Single cell bangla braille book reader for visually impaired people.” IEEE ICBSLP 2018. Paper |
|
Design and source code from Jon Barron's website |